

{kind=link}
Video Friday is your weekly collection of superior robotics movies, collected by your folks at IEEE Spectrum robotics. We additionally put up a weekly calendar of upcoming robotics occasions for the following few months. Please ship us your occasions for inclusion.
Robotics Summit & Expo: 10–11 Could 2023, BOSTON
ICRA 2023: 29 Could–2 June 2023, LONDON
Power Drone & Robotics Summit: 10–12 June 2023, HOUSTON
RoboCup 2023: 4–10 July 2023, BORDEAUX, FRANCE
RSS 2023: 10–14 July 2023, DAEGU, SOUTH KOREA
IEEE RO-MAN 2023: 28–31 August 2023, BUSAN, SOUTH KOREA
CLAWAR 2023: 2–4 October 2023, FLORIANOPOLIS, BRAZIL
Humanoids 2023: 12–14 December 2023, AUSTIN, TEX.
Get pleasure from at the moment’s movies!
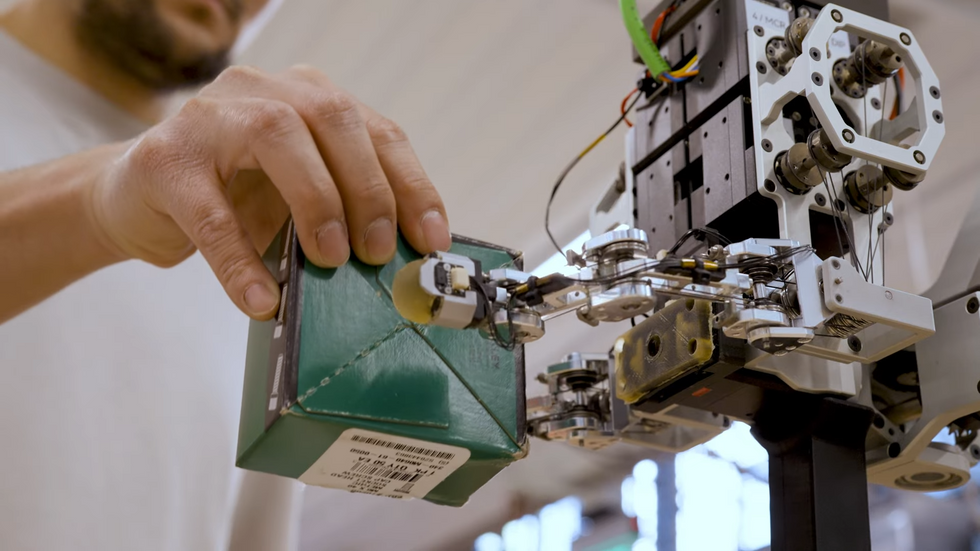
Trying to give robots a extra nimble, human-like contact MIT engineers have now developed a gripper that grasps by reflex. Slightly than begin from scratch after a failed try, the workforce’s robotic adapts within the second to reflexively roll, palm, or pinch an object to get a greater maintain.
[ MIT ]
Roboticists on the Max Planck Institute for Clever Programs in Stuttgart have developed a jellyfish-inspired underwater robotic with which they hope at some point to gather waste from the underside of the ocean. The virtually noise-free prototype can lure objects beneath its physique with out bodily contact, thereby enabling secure interactions in delicate environments comparable to coral reefs. Jellyfish-Bot may grow to be an necessary instrument for environmental remediation.
Excited to share our newest collaborative work on humanoid robotic behaviors with Draco 3. We sit up for a day that these robots will help us at dwelling and at work to carry out uninteresting and time consuming duties!
[ UT HCRL ]
This analysis focuses on the design of a novel hybrid gripper that permits versatile greedy and throwing manipulation with a single actuator. The gripper contains a novel latching mechanism that drives two passive inflexible fingers by elongating/releasing the coupled elastic strip. This association offers the twin perform of adapting to things with completely different geometries, various floor contact pressure traits, and storing power within the type of elastic potential. The proposed latching mechanism can swiftly shift from a fast launch to a gradual launch of the saved elastic potential, enabling larger object acceleration throughout throwing and no acceleration whereas putting. By doing so, the item might be positioned on the desired location even farther than the manipulator’s reachable workspace.
[ Paper ]
Thanks, Nagamanikandan!
Animals (or at the very least, many animals) are squishy for a purpose–it helps to handle secure environmental contact. Let’s make all robots squishy!
[ Paper ]
Thanks, Pham!
This quick video reveals an actuator from Ed Habtour on the College of Washington, modeled after the vertebrae of sea birds and snakes.
[ UW ]
Thanks, Sarah!
This video presents outcomes on autonomous exploration and visible inspection of a ballast tank inside an FPSO vessel. Particularly, RMF–a collision tolerant aerial robotic implementing multi-modal SLAM and path planning performance–is deployed contained in the ballasts of the vessel and performs the autonomous inspection of three tank compartments with none prior information of the setting apart from a tough estimate of the geometric midpoint of every compartment. Such info is available and doesn’t require entry to hard-to-access CAD fashions of ships. The mission takes place in lower than 4 minutes and ensures each the geometric mapping of these compartments and their visible inspection with sure decision ensures.
[ ARL ]
A workforce from Los Alamos Nationwide Laboratory lately went to the Haughton Influence Crater on Devon Island, Canada. It’s the largest uninhabited island on the planet. Nina Lanza and her workforce examined autonomous drones within the frigid setting that’s just like Mars.
[ LANL ]
OK, as soon as city supply drones can do that, possibly I’ll pay extra consideration to them.
[ HKUST ]
Based in 2014, Verity delivers totally autonomous indoor drone methods which can be trusted in environments the place failure just isn’t an possibility. Primarily based in Zurich, Switzerland, with world operations, Verity’s system is used to finish 1000’s of totally autonomous stock checks on daily basis in warehouses in every single place.
[ Verity ]
On this video you’ll study in regards to the ACFR marine group and a few of the analysis initiatives they’re at present engaged on.
[ ACFR ]
I’m together with this video as a result of rising tea is gorgeous.
[ SUIND ]
On this video we showcase a Husky-based robotic geared up with a Franka Analysis 3 Robotics Arm. The Franka Analysis 3 by Franka Emika is the reference world-class, pressure delicate robotic system that empowers researchers with easy-to-use robotic options in addition to with low-level entry to robotic’s management and studying capabilities. The robotic can be outfitted with Clearpath’s IndoorNav Autonomy Software program, which allows sturdy point-to-point autonomous navigation of cellular robots.
[ Clearpath ]
This Tartan Planning Sequence discuss on is from Sebastian Scherer, on “Informative Path Planning, Exploration, and Intent Prediction.”
[ Air Lab ]
This Stanford HAI Seminar is from Oussama Khatib, on “From Romeo and Juliet to OceanOnek; Deep-Sea Robotic Exploration.”
https://www.youtube.com/watch?v=jSYBH4PjN48
[ Stanford HAI ]